Position, Navigation & Timing (PNT) services are essential for the correct operation of devices (e.g. smartphones) and critical infrastructure (e.g. banking, electrical grid) on which we rely on every day. These services depend on the successful operation of Global Navigation Satellite Systems (GNSS) such as GPS, which account for 150$B revenue worldwide according to the EU’ GNSS Market Report 2019. Nevertheless, GPS was designed in the 1970s
Motivation for a new GNSS space segment architecture design study ?
- Extended satellite lifetime : from 5 (1970s) to 30 years (now)
- Space debris concerns
- Miniaturization of atomic clocks
- Demand for stronger signals
- Indoor positioning
- Harmful Interference
- Decreased cost in the access to space
- Global ground infrastructure
Given the current technological and programmatic environment:
- What are the main trade-offs in GNSS space segment architecture design?
- Are there alternative constellation designs that could outperform the existing GNSS?
Objectives :
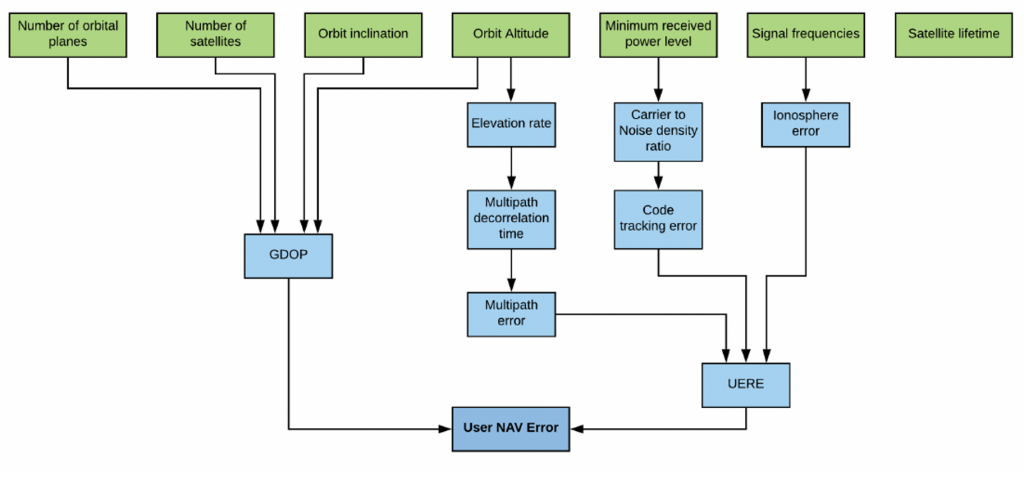
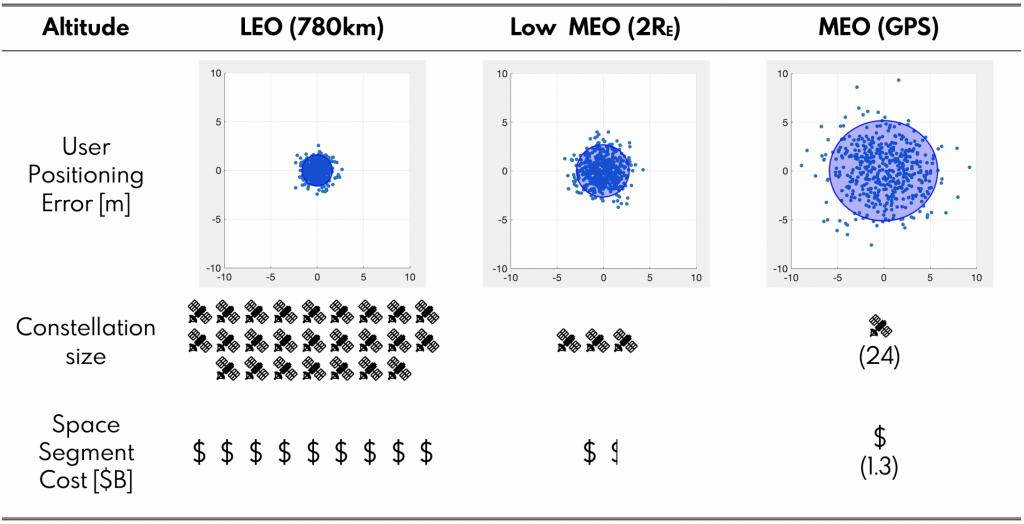
- Maximize User Navigation Error (UNE) = User Equivalent Range Error (UERE) x Geometric Dilution of Precision (GDOP)
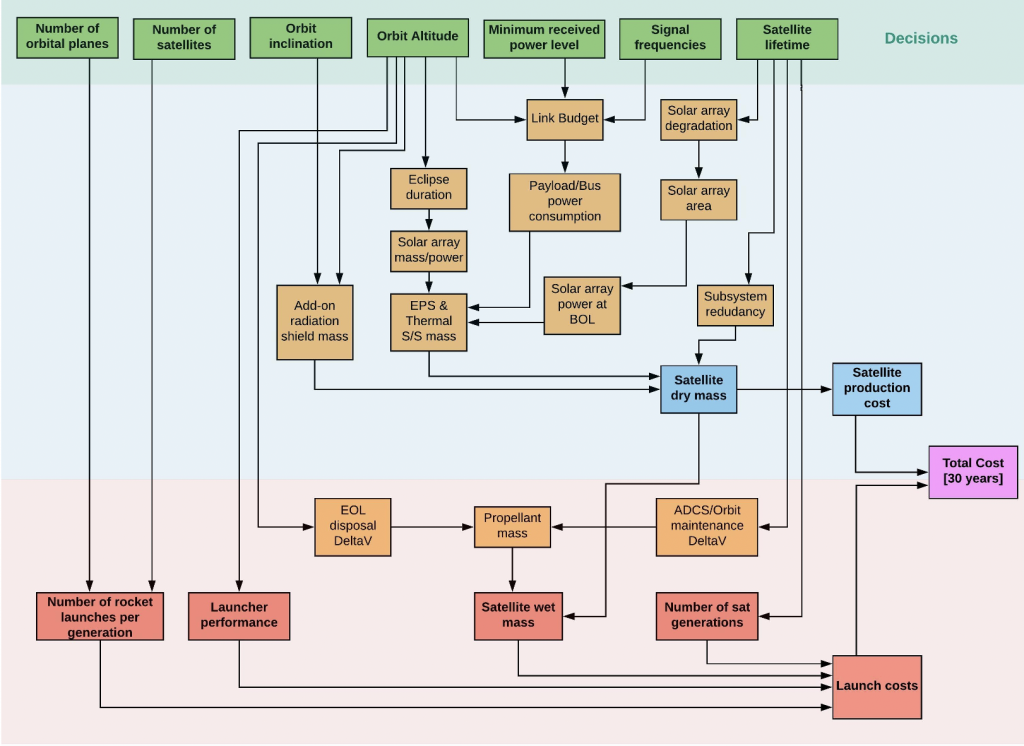
- Minimize Total Space Segment Cost
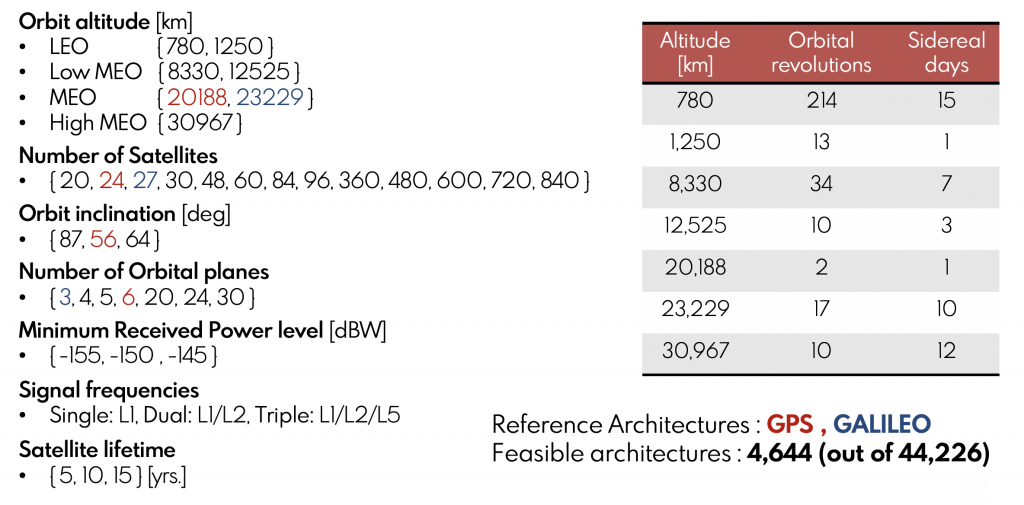
Technique : Tradespace Exploration
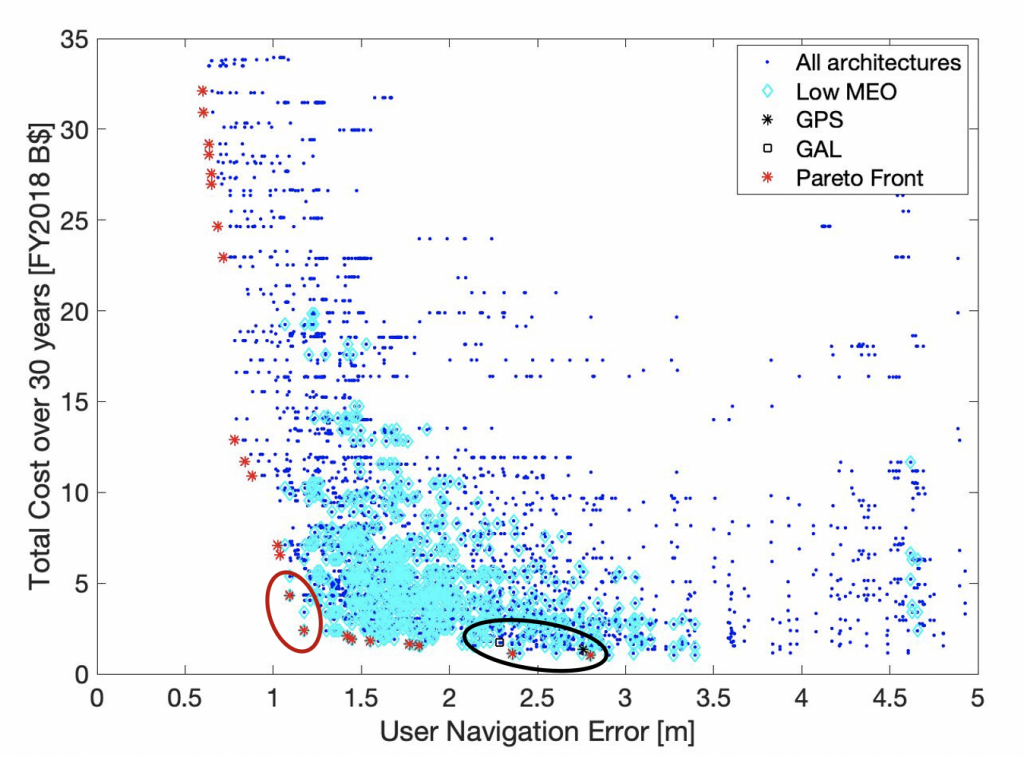
Conclusions
Low MEO (Alt ≅ 2RE) constellations
- Can outperform the current GNSS (MEO) at similar costs-60% reduction in TX power needed to achieve same RX power level
- Stronger Doppler signatures reduced multipath errors
- < 10 – 25% DV for end-of-life disposal (re-entry)
- Increased robustness to single-satellite failure.