Funding: NASA Advanced Information Systems Technology (AIST) Program, Grant #80NSSC22K1490
Period of Performance: August 2022 – May 2025
PI: Daniel Selva Valero, Texas A&M University
Overview
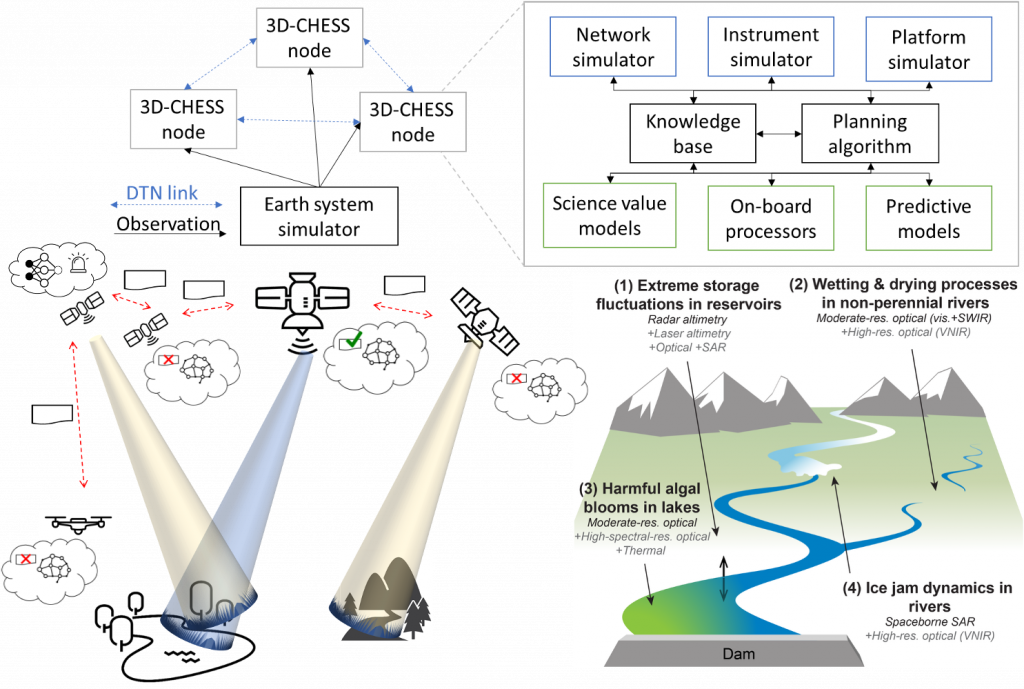
The 3D-CHESS project (Decentralized, Distributed, Dynamic and Context-Aware Heterogeneous Sensor Systems) demonstrated proof of concept (TRL 3) for a context-aware Earth observing sensor web of interconnected space, air, and ground nodes. Context awareness is defined as the ability for nodes to gather, exchange, and reason about contextual information—including the state of the observable environment, the state and capabilities of the node itself, and those of other nodes in the network—and how those relate to task requests and mission objectives.
The project focused on a multi-sensor inland hydrologic and ecological monitoring system with three interdependent mission objectives: sediment transport during high-flow events, harmful algal blooms, and wetting/drying processes in intermittent rivers. The sensor web operates across heterogeneous platforms including satellites, UAVs, and ground stations, enabling autonomous, decentralized coordination without human intervention.
Technical Approach
The 3D-CHESS system is implemented as a multi-agent system built on three pillars:
1. Knowledge Base & Reasoning
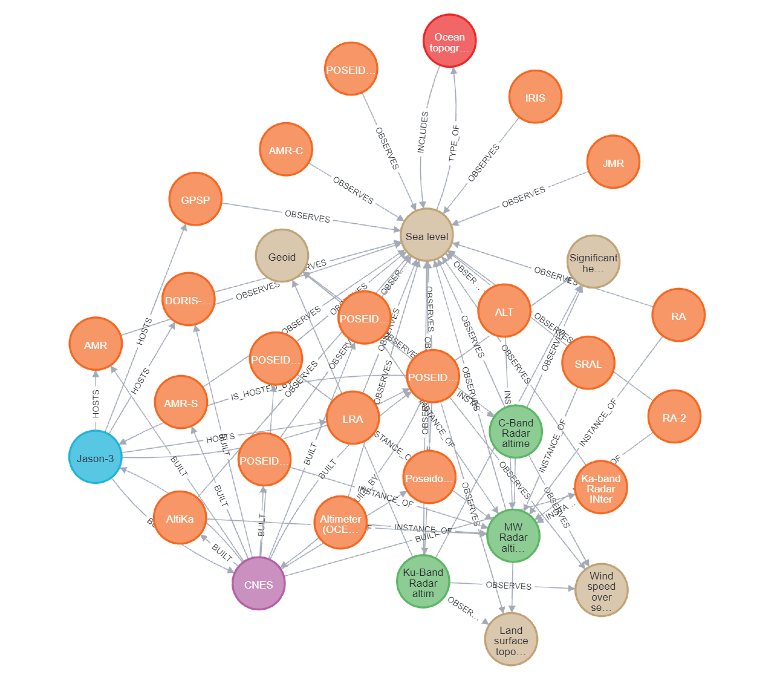
A Knowledge Graph (KG) built in Neo4j stores information about Earth observation satellites, their instruments, and the measurements they can generate, drawn primarily from the Committee on Earth Observing Satellites (CEOS) database. The KG contains 3,536 nodes and 15,193 relations. Additional sensor–observable triples were mined from IEEE TGARSS abstracts (1990–2020) using SciBERT for named entity recognition and SpaCy for entity linking. To handle noisy, automatically-extracted triples, the KG was extended to an Uncertain Knowledge Graph (UKG) with confidence scores, enabling inference via the UKGE embedding framework.
2. Planning & Coordination Strategies
The project developed and benchmarked several coordination strategies for autonomous task allocation across heterogeneous sensor networks:
- Periodic reward grid sharing and local replanning: Agents periodically share observations, update a reward grid reflecting event states, and replan using dynamic programming or integer programming algorithms.
- Asynchronous consensus-based bundle algorithm (ACBBA): Agents immediately respond to detected events by bidding for tasks and reaching consensus through iterative communication rounds, enabling rapid reactive coordination.
- Centralized integer programming: Used as a benchmark; feasible for constellations up to ~10 satellites with planning horizons of 1–2 hours.
3. Mission Specification & Science Value Modeling
Agents evaluate the scientific value of potential observations using executable science traceability matrices based on the VASSAR method. Each agent’s mission is defined as a set of objectives with associated measurement requirements and preference functions over data quality attributes (spatial resolution, temporal resolution, spectral coverage, etc.). Science value is combined with engineering cost to compute a utility function driving autonomous observation decisions.
Multi-Agent Simulation Tool (DMAS)
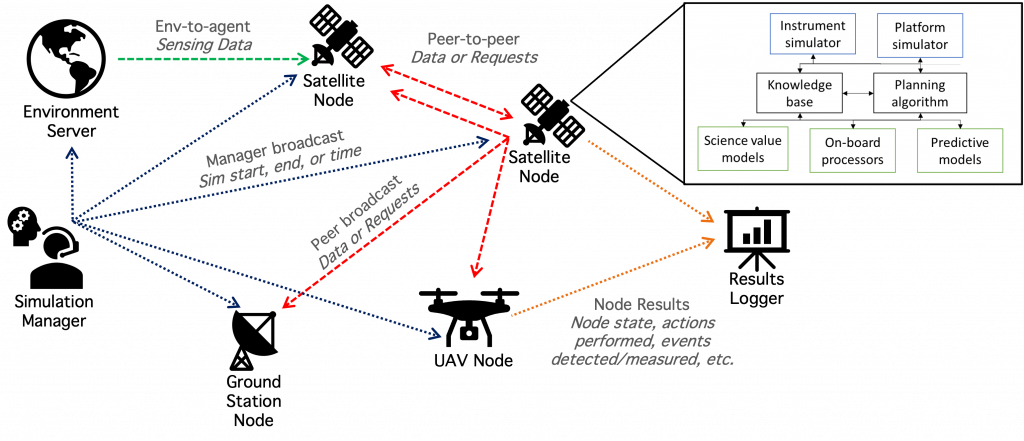
The team developed DMAS (Distributed Multi-Agent Simulation), a Python-based open-source tool for simulating heterogeneous sensor webs including satellite, UAV, and ground nodes. The architecture uses ZeroMQ messaging for peer-to-peer and broadcast communication, a centralized Environment Server for Earth state simulation, and a Simulation Manager for time synchronization. Each agent runs a multi-threaded architecture implementing sense–think–do loops plus optional science, engineering, and planning modules.
Key Results
Four application scenarios were simulated and evaluated against status-quo baselines:
- Floods & Total Suspended Sediments: 3D-CHESS achieved 2–5× more co-observations of water level and TSS compared to the status quo for low and medium agility spacecraft.
- Algal Blooms: Responsive, steerable constellations achieved 8 unique co-observations within the 4-hour decorrelation window with an average revisit time of 3.25 hours—significantly better than non-responsive baselines.
- Precipitation Events: Reactive planning increased observed rain events from 52 to 1,607 (out of 5,183) compared to initial planning only. Without coordination, multi-sensor co-observation was impossible (0 vs. 13 co-observed events).
- Intermittent Rivers (UAV): An integer programming planner based on the Orienteering Problem with Hotel Selection achieved 92.6% of the maximum possible science score for UAV-based river monitoring.
Systematic parametric studies across 49 sampled scenarios showed that periodic replanning provides a median improvement of ~15% in observation count (up to 54% in favorable cases). Event duration was identified as the most important factor affecting the value of coordination.
Augmentation: Open-Source Tool Ecosystem (EOSE-API)
Team
PI: Daniel Selva (Texas A&M University)
Co-Investigators: George Allen (Virginia Tech), Huilin Gao (Texas A&M University), Ankur Mehta (UCLA), Yizhou Sun (UCLA), Vinay Ravindra (NASA Ames/BAERI), Cedric David (JPL/Caltech),
Graduate Students: Alan Aguilar Jaramillo (TAMU), Ben Gorr (TAMU), Molly Stroud (VTech), David Fornos (TAMU), Vivian Cheng (UCLA), Zida Wu (UCLA), Wooyeong Cho (UCLA)
Selected Publications
- B. Gorr, A. Aguilar Jaramillo, H. Gao, A. Mehta, Y. Sun, V. Ravindra, C.H. David, G.H. Allen, D. Selva. Decentralized Satellite Constellation Replanning for Event Observation. Journal of Spacecraft and Rockets, 2025. https://doi.org/10.2514/1.A36143
- B. Gorr, D. Selva, H. Gao, E. Ellis, J. Morgan, M. Stroud, G. Allen, Y. Li. Design of a satellite constellation for monitoring inland water quality. Acta Astronautica 219, pp. 875–888, 2024.
- A. Aguilar Jaramillo and D. Selva. Decentralized Hybrid Approach for Satellite Observation Scheduling with Dynamic Event Detection Under Rigid Communications Constraints. IWPSS 2025.
- D. Fornos, D. Selva, A. Demagall, P. Grogan, V. Ravindra. Flexible Open-source Tool Ecosystem For Automated Tradespace Analysis And Exploration Of Earth Observation Missions. IGARSS 2025.